
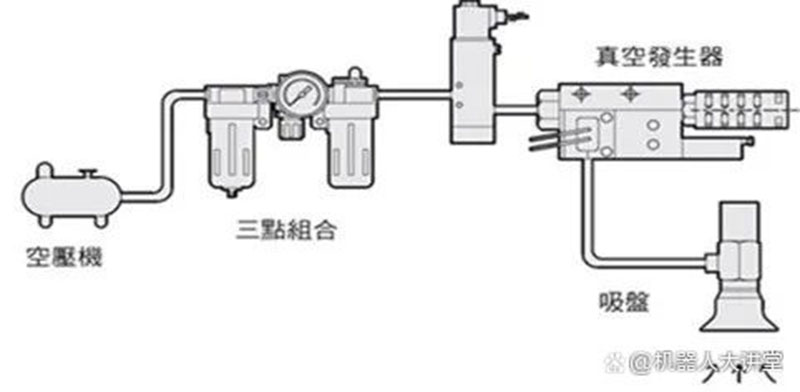
Vanuit het perspectief van de functionele structuur is de uitvoering van de vacuümgenerator voornamelijk de elektromagnetische regelklep om de vacuümgenerator te besturen om het genereren en stoppen van negatieve druk te realiseren, om de functie van het aantrekken en loslaten van het werkstuk te bereiken.
Als gevolg hiervan omvat het systeem doorgaans de volgende componenten: 1. Persluchtbron;2. Filteren;3. Magneetventiel omschakelen;4. Vacuümactuator;5. Eindzuignap, airbag, enz. (Een typische structuur wordt weergegeven in de onderstaande afbeelding).
Bovendien hebben sommige fabrikanten, onder de eisen van de industriële automatisering, om de bewaking van het vacuümadsorptieproces te realiseren, de afgelopen jaren over het algemeen pneumatische besturingscomponenten zoals flowmeters, drukdetectieschakelaars en naderingsschakelaars aan het systeem toegevoegd.
Omdat de meeste componenten echter door de integrator worden aangepast aan de behoeften van de klant en de werkomstandigheden ter plaatse, is de complexiteit van het hele systeem vaak hoog.
Tegelijkertijd leiden fabrikanten van meerdere componenten tot complexe installatie- en inbedrijfstellingswerkzaamheden op locatie, en sommige daarvan hebben een hoog energieverbruik en zijn 100% afhankelijk van gasbronnen.Gedeeltelijke integratie is wellicht niet mogelijk
Vermijd geluidsoverlast, wat onaanvaardbare problemen met zich meebrengt voor zeer nauwkeurige en zeer schone omgevingen zoals lithiumbatterijen en halfgeleiders.
Over het geheel genomen is EVS een nieuwe generatie elektrische, intelligente vacuümactuators die geen extra persluchtbron nodig hebben, wat ongetwijfeld in het oog springt.
Het grootste voordeel van het luchtbesparende systeem is het installatiegemak.Omdat hierdoor ongetwijfeld veel hulpcomponenten kunnen worden verminderd, waaronder luchtcompressoren, luchtopslagtanks, luchtzuiveringsapparatuur en uitlaatleidingen, enz., waardoor de bedrading eenvoudiger, handiger en duidelijker wordt voor klanten.
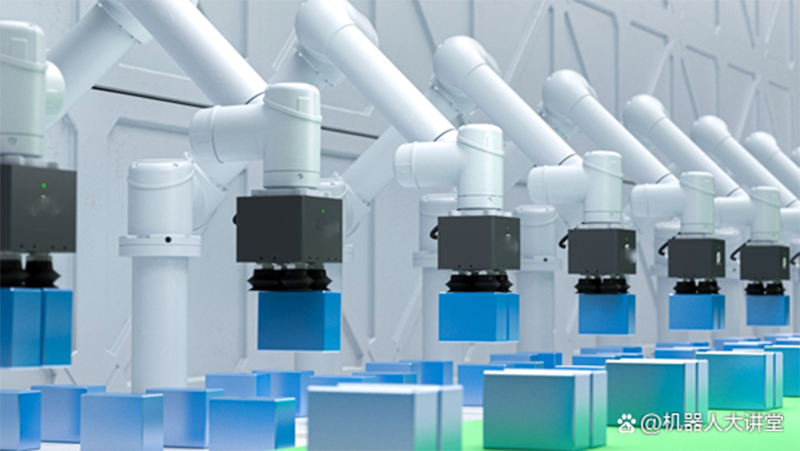
Er wordt gemeld dat veel scènes, waaronder mobiele robotplatforms, 3C-elektronische assemblage, productie van lithiumbatterijen, productie van halfgeleiders, expreslogistiek, enz., momenteel een relatief compacte ruimte-indeling hebben.
EVS08 vierkante zuigbatterij
Meer details en voordelen
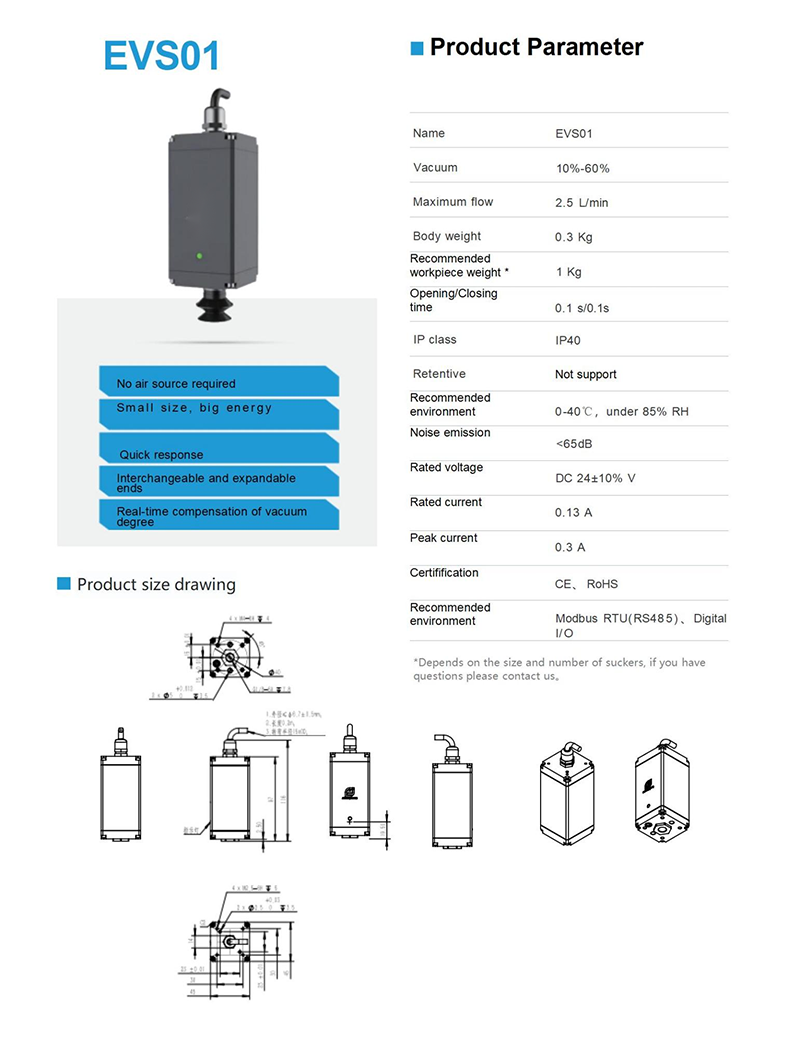
De robotcollegezaal ontdekte dat dit product, dat er heel klein uitziet en slechts 2,5 kg weegt, een hoog niveau van 10 kg kan bereiken.Vanwege het 24V-laagspanningsontwerp bedraagt het energieverbruik 20% van het traditionele pneumatische systeem en kan de adsorptiekracht aan het uiteinde worden ingesteld en aangepast, en kan de adsorptiekracht 102-510N bereiken.
Wat het structurele ontwerp betreft, hanteert EVS een compacter en lichter structureel ontwerp, waardoor EVS 30% kleiner is dan de traditionele aerodynamica bij hetzelfde gewicht aan lading.
Tegelijkertijd kan het direct worden aangesloten op de connector aan het uiteinde van de robotarm, waardoor overtollige hulpcomponenten worden verminderd, het gebruik flexibeler wordt, snel kan worden ingezet en gemakkelijk meerdere grote objecten kan worden geabsorbeerd, vooral geschikt voor stapelen, hanteren en andere scènebewerkingen.
Om het gebruiksgemak te vergroten, heeft de elektrische vacuümactuator ook een geïntegreerde interface, die kan worden gebruikt om het hele proces van het adsorberen van objecten te controleren en te monitoren.
Er wordt gemeld dat dit voor het gemak van klanten is om de vacuümgraad van de vacuümactuator te regelen via instructies, en ook verbinding te maken via de IO-link voor monitoring en voorspellend onderhoud van het adsorptieproces.Statusmonitoring vermindert fouten en downtime en garandeert de beschikbaarheid van het systeem.
Op basis hiervan komen de voordelen en kenmerken van EVS ook tot uiting in de volgende punten:
1. Compacte structuur en lichtgewicht: EVS is 30% kleiner dan de traditionele pneumatische maat bij het absorberen van hetzelfde gewicht aan belasting.Het kan worden verbonden met de connector aan het uiteinde van de mechanische arm om de absorptie van de belasting te realiseren, vooral geschikt voor stapelen, hanteren en andere scèneoperaties;
2. Overvloedige terminalconfiguratie: verschillende soorten zuignappen, airbags en andere componenten kunnen worden geconfigureerd om het grijpen van verschillende objecten te realiseren, inclusief vierkante, bolvormige en speciaal gevormde componenten;
3. Dubbele kanalen kunnen onafhankelijk worden bestuurd: bedien eenvoudig de linker- en rechterkant van de vacuümactuator, en de twee zijden zijn onafhankelijk van elkaar, waardoor de werkefficiëntie van de productielijn verder wordt verbeterd.Het realiseert tegelijkertijd zuigen en plaatsen, wat het hanteren en sorteren van objecten aanzienlijk vergemakkelijkt, waardoor ruimte en tijd worden bespaard;
4. Instelbare zuigkracht: de mate van vacuüm kan worden aangepast aan de kenmerken van het gezogen product, en realtime vacuümcompensatie kan worden gerealiseerd;
5. Statusfeedback: het heeft een vacuümfeedbacksensor, die de adsorptiestatus van objecten in realtime kan detecteren en feedback en alarm kan geven;
6. Uitschakelbeveiliging: na het uitschakelen kan het adsorptie-uitschakeling zelfremmend realiseren om de geadsorbeerde objecten te beschermen;
7. Sterk aanpassingsvermogen: ondersteuning van 24V I/O en MODBUS RTU (RS485) communicatieprotocol;
8. Eenvoudig te installeren en te debuggen: het communicatieprotocol is eenvoudig en leesbaar, wat de moeilijkheidsgraad van het debuggen aanzienlijk vermindert.Bovendien kan de foutopsporingssoftware van de hostcomputer als cadeau worden bijgevoegd, die kan worden ingesteld en bewerkt om functieparameters offline in te stellen.
Conclusie en de toekomst
Onder de trend van automatisering en intelligentie zijn elektrische vacuümactuators steeds meer een belangrijk onderdeel geworden om de normale werking van robots en automatiseringssystemen te garanderen, waardoor het gebruik van elektrische actuatorsystemen handiger en gebruiksvriendelijker wordt en aan meer gediversifieerde scenario’s kan voldoen, zoals mobiele composietrobots..
De geïntegreerde interface, de rijke terminalconfiguratie en andere optimalisaties kunnen de betrouwbaarheid van de belangrijkste componenten van de robot verder verbeteren, productieonderbrekingen en implementatieproblemen op afstand voor eindgebruikers verminderen, en de onderhouds- en after-saleskosten verder verlagen.
Posttijd: 19 april 2023